Physics I: 1-5 Flashcards
(255 cards)
base units
standard units around which the system itself is designed
derived units
created by associating base units with each other
vectors
numbers that have magnitude and direction
ex: displacement, velocity, acceleration, force
vector
examples
displacement, velocity, acceleration, force
scalars
numbers that have magnitude only
no direction
ex: distance, speed, energy, pressure, mass
scalar
examples
distance, speed, energy, pressure, mass
common notation for vector quantities
arrow or boldface
common notation for scalar quantities
italic
resultant
sum or difference of 2 or more vectors
tip to tail method of vector addition

vector addition may be accomplished two ways:
- tip to tail method
- breaking a vector into its components and using the Pythagorean theorem
COMMUTATIVE
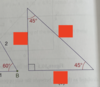
trig
X =

X = V cos theta
trig
Y =

Y = V sin theta
using Pythagorean theorem for vector addition
vector subtraction may be accomplished by
changing the direction of the subtracted vector and then following the procedures for vector addition
A - B = A + (-B)
NOT COMMUTATIVE
finding the resultant (R) of V1 + V2 + V3
- resolve the vectors to be added into their x and y components
- add the x components to get the Rx; add the y components to get Ry
- find the magnitude of the resultant by using the Pythagorean theorem
- find the direction (theta) of the resultant using tan-1

multiplying vectors by scalars
if a vector A is multiplied by the scalar value n, a new vector B is creased such that:
B = nA
mutiplying a vector by a scalar changes the _____ and may reverse the _____
magnitude
direction
multiply vectors by other vectors to get a scalar quantity
dot product
A • B = |A| |B| cos theta
dot product
multiplying 2 vectors to get a scalar quantity
A • B = |A| |B| cos theta
multiply vectors by other vectors to get a vector quantity
cross product
A x B = |A| |B| sin theta
use right hand rule
NOT commutative - order matters
cross product
multiplying 2 vectors to get a vector quantity
A x B = |A| |B| sin theta
steps to apply right hand rule
C = A x B
- point thumb in direction of vector A
- extend fingers in direction of vector B
- the direction your palm points is the direction of the resultant C
when calculating the sum of vectors A and B (A+B), we put the tail of B at the tip of A. what would the effect of reversing this order (B+A)?
vector addtn is a commutative function
the resultant of A+B is the same as B+A